હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક LG-120, જે ફોર્મવર્કને બ્રેકેટ સાથે જોડે છે, તે દિવાલ સાથે જોડાયેલ સ્વ-ક્લાઇમ્બિંગ ફોર્મવર્ક છે, જે તેની પોતાની હાઇડ્રોલિક લિફ્ટિંગ સિસ્ટમ દ્વારા સંચાલિત છે. તેની મદદથી, મુખ્ય બ્રેકેટ અને ક્લાઇમ્બિંગ રેલ અનુક્રમે સંપૂર્ણ સેટ અથવા ક્લાઇમ્બ તરીકે કામ કરી શકે છે. ચલાવવા અને તોડી પાડવા માટે સરળ હોવાથી, સિસ્ટમ તમારી કાર્યક્ષમતામાં સુધારો કરી શકે છે અને વાજબી-મુખી કોંક્રિટ પરિણામો પ્રાપ્ત કરી શકે છે. બાંધકામમાં, સંપૂર્ણ હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ સિસ્ટમ અન્ય લિફ્ટિંગ સાધનો વિના સતત ચઢે છે અને તેથી તેને હેન્ડલ કરવું સરળ છે. ઉપરાંત, ક્લાઇમ્બિંગ પ્રક્રિયા ઝડપી અને સલામત છે. હાઈ-રાઇઝ બિલ્ડિંગ અને પુલ બાંધકામ માટે હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ સિસ્ટમ શ્રેષ્ઠ પસંદગી છે.
આજના લેખમાં, અમે નીચેના પાસાઓથી અમારા હોટ-સેલ ઉત્પાદનનો પરિચય કરાવવા જઈ રહ્યા છીએ:
• બાંધકામમાં ફાયદા
•હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક સિસ્ટમનું માળખું
• LG-120 નું ક્લાઇમ્બિંગ વર્કફ્લો
•નો ઉપયોગહાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક LG-120
બાંધકામમાં ફાયદા:
૧) હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક સંપૂર્ણ સેટ તરીકે અથવા વ્યક્તિગત રીતે ચઢી શકે છે. ચઢાણ પ્રક્રિયા સ્થિર છે.
2) હેન્ડલ કરવામાં સરળ, ઉચ્ચ સુરક્ષા, ખર્ચ-અસરકારક.
૩) એકવાર એસેમ્બલ થયા પછી હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ સિસ્ટમ બાંધકામ પૂર્ણ ન થાય ત્યાં સુધી તોડી પાડવામાં આવશે નહીં, જે બાંધકામ સ્થળ માટે જગ્યા બચાવે છે.
૪) ચઢાણ પ્રક્રિયા સ્થિર, સુમેળભરી અને સલામત છે.
૫) તે સર્વાંગી ઓપરેટિંગ પ્લેટફોર્મ પૂરું પાડે છે. કોન્ટ્રાક્ટરોને અન્ય ઓપરેટિંગ પ્લેટફોર્મ સેટ કરવાની જરૂર નથી, આમ સામગ્રી અને મજૂરીનો ખર્ચ બચે છે.
૬) માળખાના બાંધકામમાં ભૂલ નાની છે. સુધારાનું કામ સરળ હોવાથી, બાંધકામની ભૂલ ફ્લોર બાય ફ્લોર દૂર કરી શકાય છે.
૭) ફોર્મવર્ક સિસ્ટમની ચઢાણ ગતિ ઝડપી છે. તે સમગ્ર બાંધકામ કાર્યને ઝડપી બનાવી શકે છે.
૮) ફોર્મવર્ક જાતે જ ચઢી શકે છે અને સફાઈનું કામ સ્થળ પર જ કરી શકાય છે, જેથી ટાવર ક્રેનનો ઉપયોગ ઘણો ઓછો થશે.
9) બ્રેકેટ અને ક્લાઇમ્બિંગ રેલ વચ્ચે બળ ટ્રાન્સમિશન માટે ઉપલા અને નીચલા કોમ્યુટેટર્સ મહત્વપૂર્ણ ઘટકો છે. કોમ્યુટેટરની દિશા બદલવાથી બ્રેકેટ અને ક્લાઇમ્બિંગ રેલના સંબંધિત ક્લાઇમ્બિંગનો ખ્યાલ આવી શકે છે. સીડી ચઢતી વખતે, સિલિન્ડર બ્રેકેટના સિંક્રનાઇઝેશનની ખાતરી કરવા માટે પોતાને સમાયોજિત કરે છે.
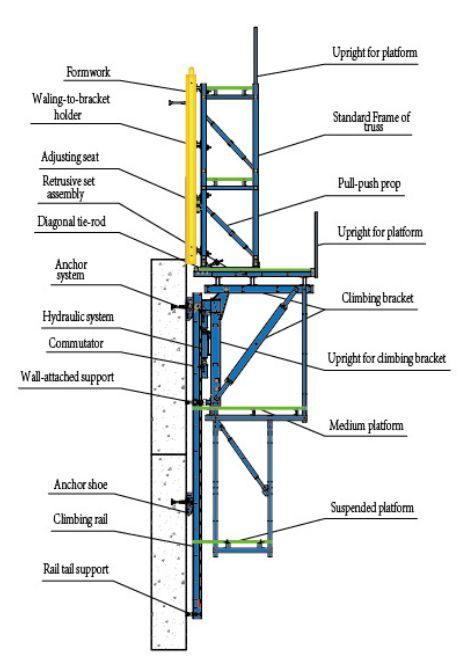
હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક સિસ્ટમનું માળખું:
હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક સિસ્ટમ એન્કર સિસ્ટમ, ક્લાઇમ્બિંગ રેલ, હાઇડ્રોલિક લિફ્ટિંગ સિસ્ટમ અને ઓપરેટિંગ પ્લેટફોર્મથી બનેલી છે.
LG-120 નું ક્લાઇમ્બિંગ વર્કફ્લો
કોંક્રિટ રેડ્યા પછી → ફોર્મવર્ક તોડી નાખો અને પાછળ ખસેડો → દિવાલ સાથે જોડાયેલા ઉપકરણો ઇન્સ્ટોલ કરો → ક્લાઇમ્બિંગ રેલ ઉપાડો → બ્રેકેટને જેક કરો → રીબાર બાંધો → ફોર્મવર્ક તોડી નાખો અને સાફ કરો → ફોર્મવર્ક પર એન્કર સિસ્ટમ ઠીક કરો → મોલ્ડ બંધ કરો → કોંક્રિટ કાસ્ટ કરો
a. પ્રી-એમ્બેડેડ એન્કર સિસ્ટમની વાત કરીએ તો, માઉન્ટિંગ બોલ્ટ્સ વડે ફોર્મવર્ક પર ક્લાઇમ્બિંગ કોનને ઠીક કરો, કોન હોલમાં રહેલા કોનને માખણથી સાફ કરો અને ઉચ્ચ-શક્તિવાળા ટાઇ રોડને કડક કરો જેથી ખાતરી થાય કે તે ક્લાઇમ્બિંગ કોનના થ્રેડમાં વહેતું નથી. એન્કર પ્લેટ ઉચ્ચ-શક્તિવાળા ટાઇ રોડની બીજી બાજુ સ્ક્રૂ કરેલી છે. એન્કર પ્લેટનો કોન ફોર્મવર્કની સામે છે અને ક્લાઇમ્બિંગ કોન વિરુદ્ધ દિશામાં છે.
b. જો એમ્બેડેડ ભાગ અને સ્ટીલ બાર વચ્ચે સંઘર્ષ હોય, તો મોલ્ડ બંધ થાય તે પહેલાં સ્ટીલ બારને યોગ્ય રીતે ખસેડવો જોઈએ.
c. ક્લાઇમ્બિંગ રેલને ઉપાડવા માટે, કૃપા કરીને ઉપલા અને નીચલા કોમ્યુટેટર્સમાં રિવર્સિંગ ડિવાઇસને એક જ સમયે ઉપરની તરફ ગોઠવો. રિવર્સિંગ ડિવાઇસનો ઉપરનો છેડો ક્લાઇમ્બિંગ રેલની સામે છે.
d. બ્રેકેટ ઉપાડતી વખતે, ઉપલા અને નીચલા કોમ્યુટેટર્સને એક જ સમયે નીચે તરફ ગોઠવવામાં આવે છે, અને નીચેનો છેડો ક્લાઇમ્બિંગ રેલની સામે હોય છે (ક્લાઇમ્બિંગ અથવા લિફ્ટિંગ રેલનો હાઇડ્રોલિક કન્સોલ એક વિશિષ્ટ વ્યક્તિ દ્વારા ચલાવવામાં આવે છે, અને દરેક રેક તે સિંક્રનાઇઝ્ડ છે કે કેમ તેનું નિરીક્ષણ કરવા માટે સેટ કરવામાં આવે છે. જો તે સિંક્રનાઇઝ્ડ નથી, તો હાઇડ્રોલિક વાલ્વ નિયંત્રણ ગોઠવી શકાય છે. બ્રેકેટ ચઢતા પહેલા, સ્તંભો વચ્ચેનું ઊભી અંતર 1 મીટર છે, અને ઊભી અંતર 1 મીટર છે. પછી, 2 સેમી પહોળા ટેપનો ઉપયોગ ચિહ્નિત કરવા માટે કરવામાં આવે છે, અને ફ્રેમ સિંક્રનાઇઝ થયેલ છે કે કેમ તે ઝડપથી જોવા માટે લેસર લેવલને ફેરવવા અને ઉત્સર્જન કરવા માટે ઇન્સ્ટોલ કરવામાં આવે છે).
ક્લાઇમ્બિંગ રેલને સ્થાને ઉપાડ્યા પછી, દિવાલ જોડાણ ઉપકરણ અને નીચલા સ્તરના ક્લાઇમ્બિંગ શંકુને દૂર કરવામાં આવે છે અને ટર્નઓવર માટે ઉપયોગમાં લેવાય છે. નોંધ: દિવાલ જોડાણો અને ક્લાઇમ્બિંગ શંકુના 3 સેટ છે, 2 સેટ ક્લાઇમ્બિંગ રેલ હેઠળ દબાવવામાં આવે છે, અને 1 સેટ ટર્નઓવર છે.
હાઇડ્રોલિક ઓટો-ક્લાઇમ્બિંગ ફોર્મવર્ક સિસ્ટમનો ઉપયોગ:

પોસ્ટ સમય: જાન્યુઆરી-૧૪-૨૦૨૨